SLA7026M Просмотр технического описания (PDF) - Allegro MicroSystems
Номер в каталоге
Компоненты Описание
производитель
SLA7026M Datasheet PDF : 12 Pages
| |||
SLA7024M, SLA7026M, AND SMA7029M
HIGH-CURRENT PWM,
UNIPOLAR STEPPER MOTOR
CONTROLLER/DRIVERS
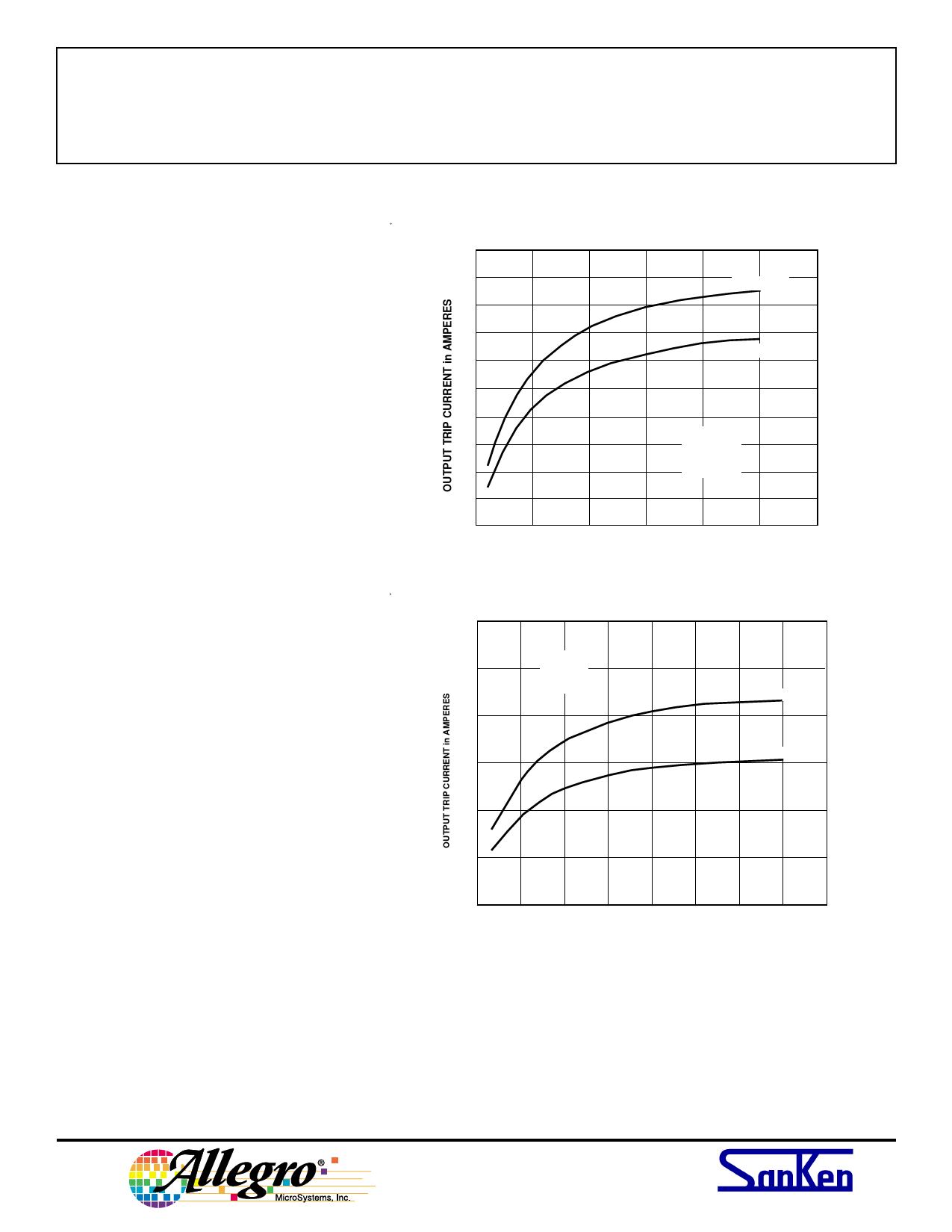
For given values of R1, R2, and Vb (VREF ≈ 0.82 V), Figures 5A and 5B
illustrate output holding current as a function of RX for two values of current-
sensing resistance (RS).
1.0
RS = 0.8 Ω
0.8
RS = 1.0 Ω
0.6
0.4
R1 = 510 Ω
R2 = 100 Ω
Vb = 5 V
0.2
0
0
100
200
300
400
500
600
HOLDING-CURRENT RESISTANCE in OHMS
Dwg. GK-015
FIGURE 5A. HOLD-CURRENT RESISTANCE
(SLA7024M and SMA7029M)
3.0
R1 = 510 Ω
2.5
R2 = 100 Ω
Vb = 5 V
2.0
RS = 0.33 Ω
RS = 0.47 Ω
1.5
1.0
0.5
0
0
100
200
300
400
500
600
700
800
HOLDING-CURRENT RESISTANCE in OHMS
Dwg. GK-015-1
FIGURE 5B. HOLD-CURRENT RESISTANCE (SLA7026M)
NOTE: Holding current determines holding torque, which is normally
greater than running torque. Consult motor manufacturer for recommended
safe holding current and motor winding temperature limits in “standstill” or
“detent” mode.
The MOSFET outputs create ringing noise with PWM, but the RC filter
precludes malfunctions. The comparator operation is affected by R5 and C3
and, thus, current overshoot is influenced by component values. Empirical
adjustment to “fine-tune” the current limit is likely.
115 Northeast Cutoff, Box 15036
™
Worcester, Massachusetts 01615-0036 (508) 853-5000
Share Link: 