AD816 Просмотр технического описания (PDF) - Analog Devices
Номер в каталоге
Компоненты Описание
производитель
AD816 Datasheet PDF : 16 Pages
| |||
0.04
0.03
0.02
0.01
0.00
–0.01
–0.02
–0.03
–0.04
12
0.010
0.005
0.000
–0.005
–0.010
–0.015
–0.020
–0.025
–0.030
PHASE
GAIN
12
6 BACK TERMINATED LOADS (25⍀)
0.5
0.4
PHASE
G = +2 0.3
RF = 1k⍀ 0.2
NTSC
0.1
0.0
GAIN
–0.1
–0.2
–0.3
3 4 5 6 7 8 9 10 11
2 BACK TERMINATED LOADS (75⍀)
0.12
0.10
0.08
0.06
G = +2
RF = 1k⍀
0.04
0.02
NTSC
0.00
–0.02
–0.04
3 4 5 6 7 8 9 10 11
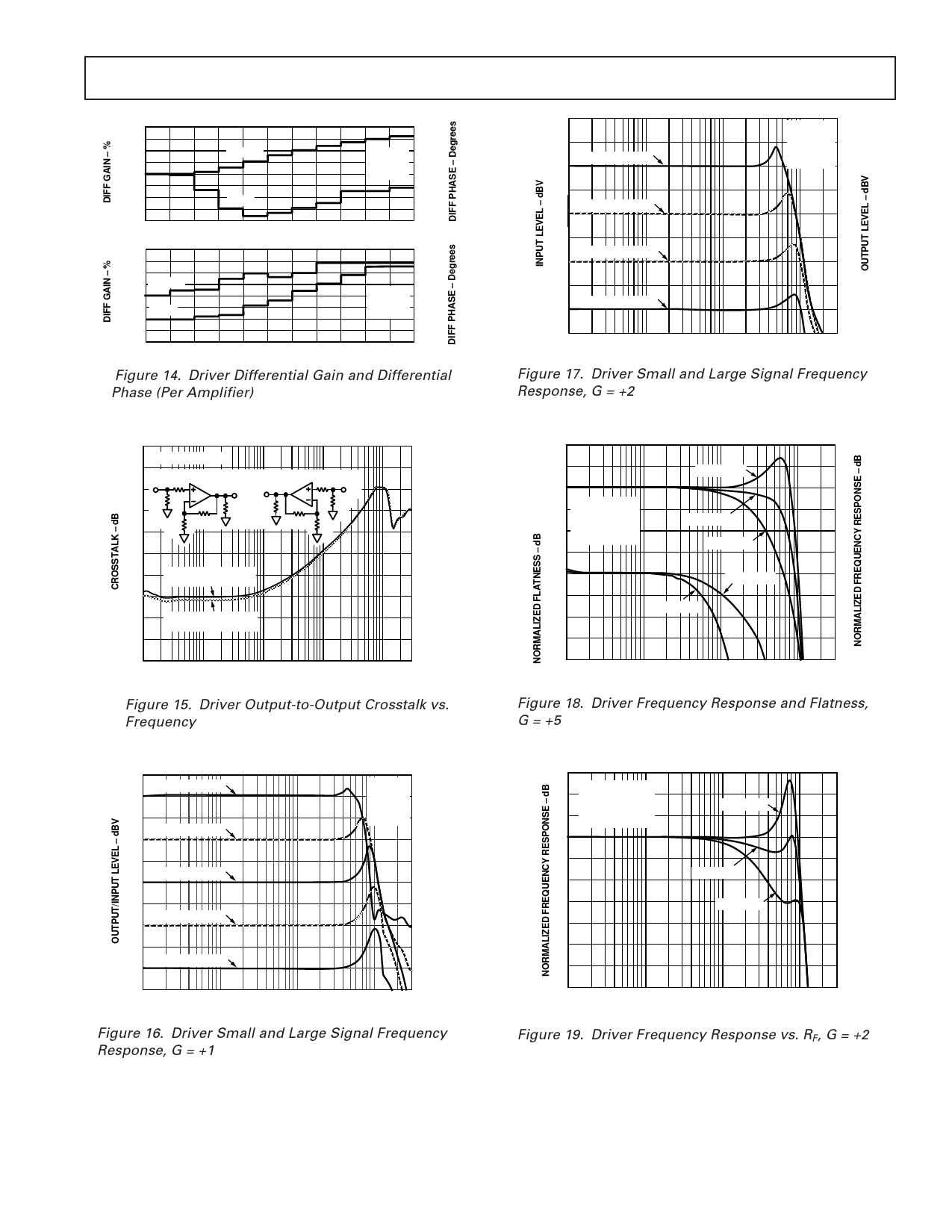
Figure 14. Driver Differential Gain and Differential
Phase (Per Amplifier)
0
VIN = 200mVrms
–10
DRIVER
DRIVER
INPUT 100⍀
–20
A
OUTPUT OUTPUT
B
100⍀ INPUT
50⍀
–30
100⍀ 100⍀
50⍀
–40
499⍀ 499⍀
499⍀ 499⍀
–50
–60
DRIVER A = INPUT
DRIVER B = OUTPUT
–70
–80
DRIVER B = INPUT
DRIVER A = OUTPUT
–90
–100
10k
100k
1M
10M
FREQUENCY – Hz
100M 300M
Figure 15. Driver Output-to-Output Crosstalk vs.
Frequency
3
VIN = 1.0Vrms
0
–3
VIN = 0.5Vrms
–6
G = +1
RF = 499⍀
RL = 100⍀
RS = 100⍀
–9
VIN = 0.25Vrms
–12
–15
VIN = 125mVrms
–18
–21
–24 VIN = 62.5mVrms
–27
100k
1M
10M
FREQUENCY – Hz
100M 300M
Figure 16. Driver Small and Large Signal Frequency
Response, G = +1
Typical Driver Characteristics–AD816
0
–3
–6
VIN = 0.5Vrms
6
G = +2
RF = 499⍀ 3
RL = 100⍀
RS = 100⍀ 0
–9
–3
–12
VIN = 0.25Vrms
–6
–15
–9
VIN = 125mVrms
–18
–12
–21
–15
–24 VIN = 62.5mVrms
–18
–27
100k
1M
10M
FREQUENCY – Hz
–21
100M 300M
Figure 17. Driver Small and Large Signal Frequency
Response, G = +2
2
RF = 499⍀
1
0
VIN = 50mVrms
G +5
RL = 100⍀
RS = 100⍀
RF = 604⍀
RF = 750⍀
–1
–2
0.1
–3
0
RF = 604⍀
–4
–0.1
–5
RF = 750⍀
–0.2
–6
–0.3
–7
–0.4
100k
1M
10M
FREQUENCY – Hz
–8
100M 300M
Figure 18. Driver Frequency Response and Flatness,
G = +5
3
VIN = 200mVrms
2 G +2
RL = 100⍀
1 RS = 100⍀
0
RF = 499⍀
–1
–2
RF = 604⍀
–3
RF = 750⍀
–4
–5
–6
–7
100k
1M
10M
FREQUENCY – Hz
100M 300M
Figure 19. Driver Frequency Response vs. RF, G = +2
REV. B
–7–
Share Link: 